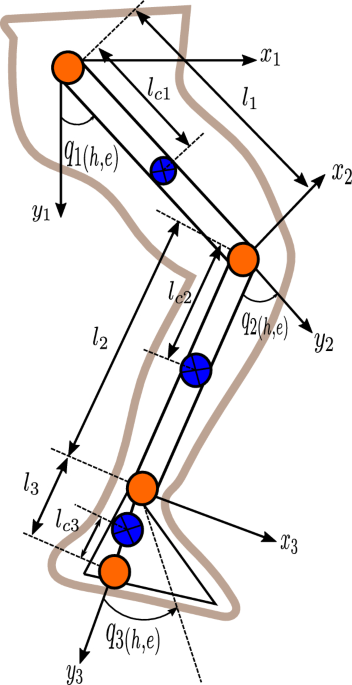
The two-segment leg has a torque-controlled actuator at the hip, and a


A) Pantograph leg with one spring around the knee joint and a
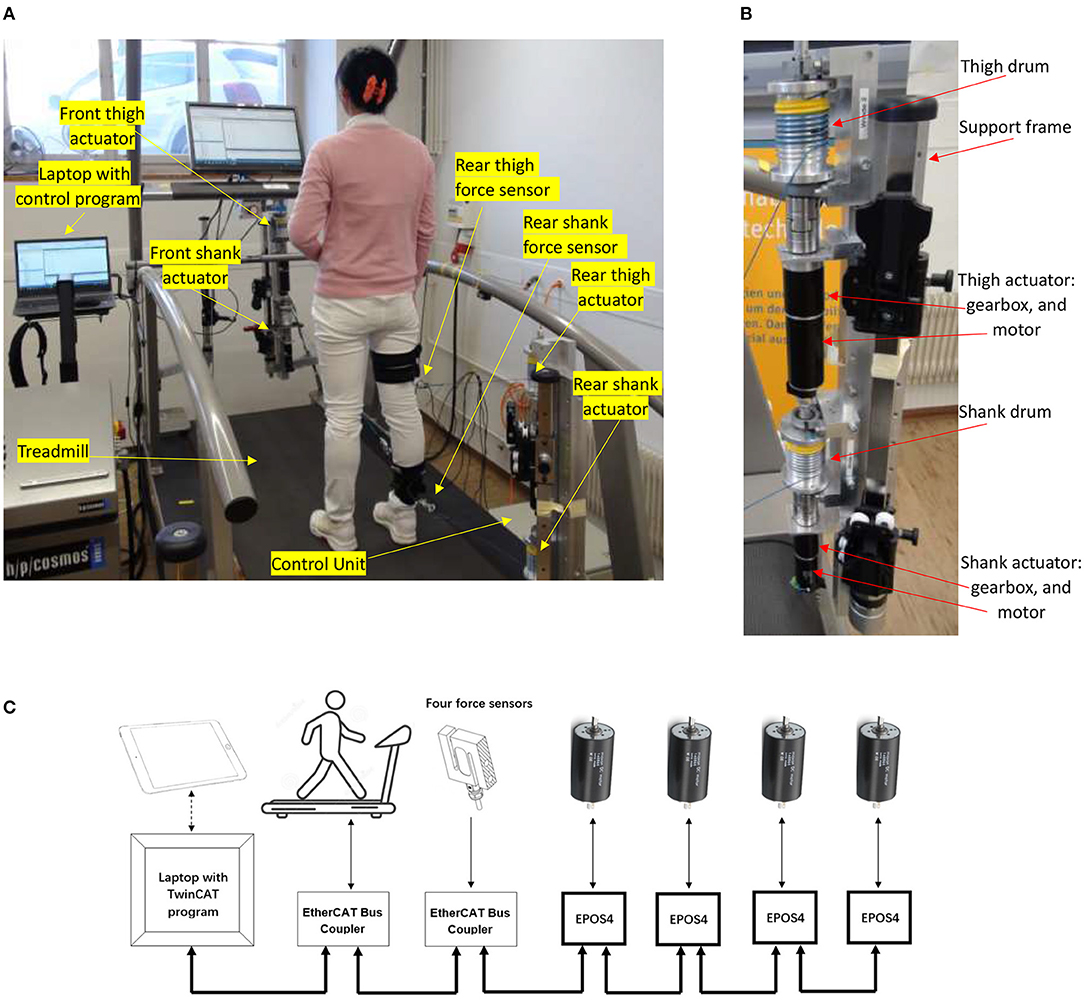
Frontiers Development of an Active Cable-Driven, Force

Steve Heim's research works Massachusetts Institute of Technology, MA (MIT) and other places
Adaptive RBF neural network-computed torque control for a
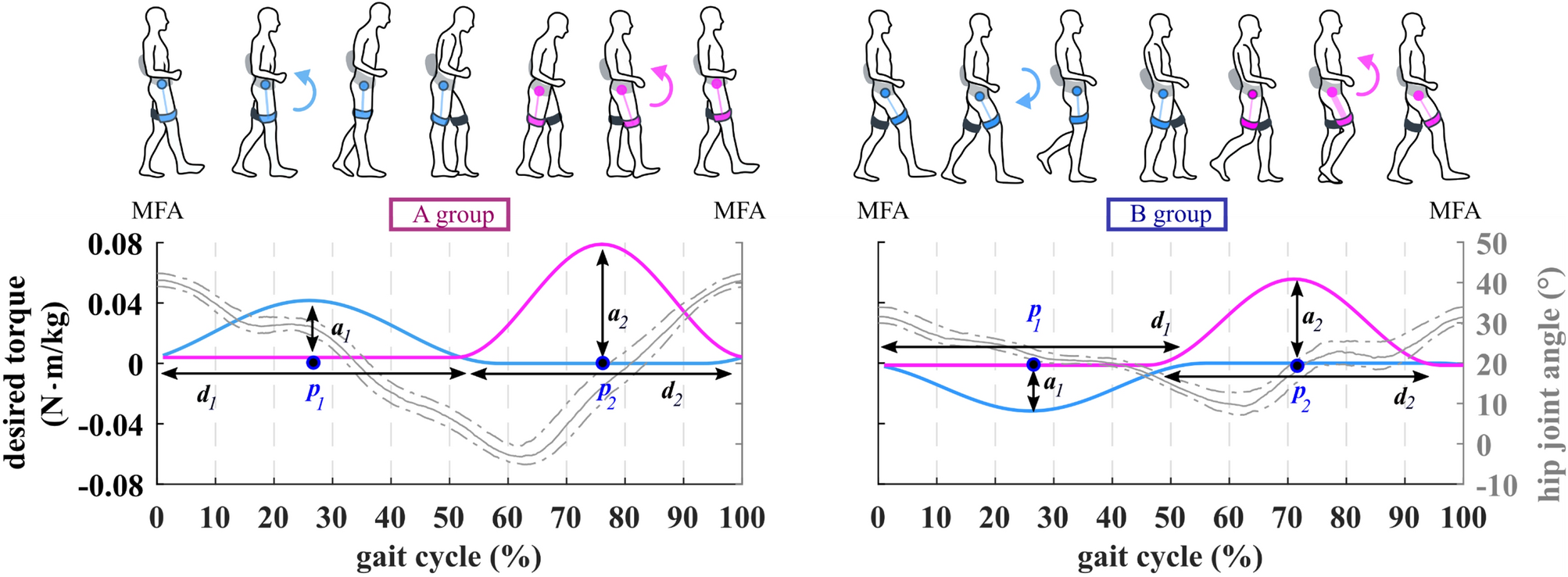
An impairment-specific hip exoskeleton assistance for gait

The two-segment leg has a torque-controlled actuator at the hip

Line graphs show: (a) Hip sagittal torque from previous research
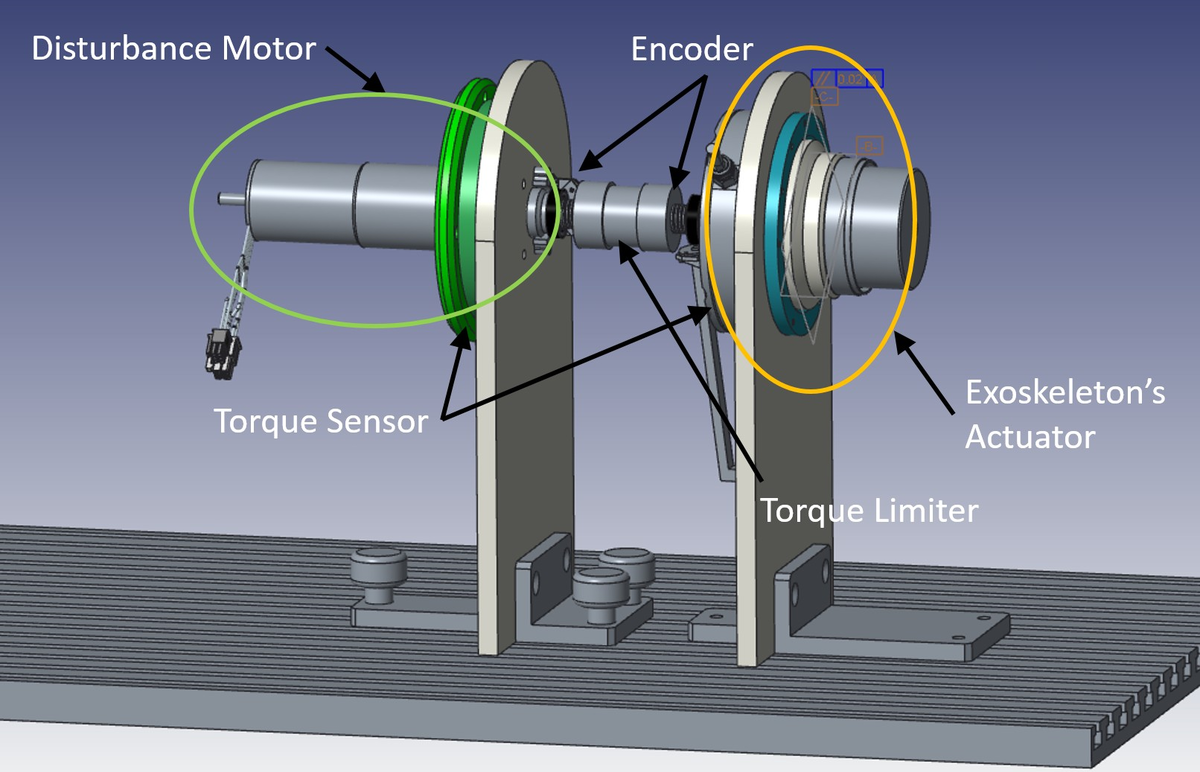
Systematic framework for performance evaluation of exoskeleton
Steve Heim's research works Massachusetts Institute of Technology, MA (MIT) and other places

Felix RUPPERT, Ph.D Student, Master of Science, Max Planck Institute for Intelligent Systems, Stuttgart, IS, Dynamic locomotion group

Leg Mechanism of LOLA

Sistema de classificação de cores composto por um conjunto de redes