How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum

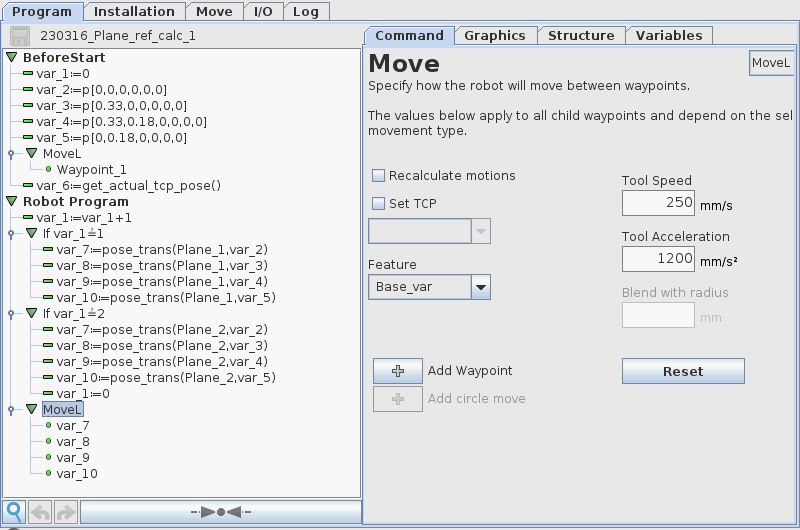
Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to
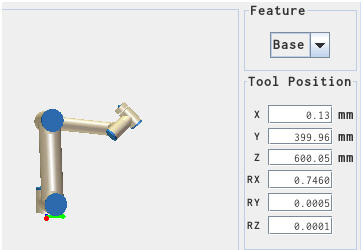
X-Y-Z-Rx-Ry-Rz-position. – UR Forum-Help-Q&A

Basic UR – Lesson 1 – Teach Waypoints. – UR Forum-Help-Q&A

Industrial Robots, Fundamentals of Industrial Robots

Can't save program in VirtualBox - Technical Questions - Universal Robots Forum
Planes and position variables 2 – UR Forum-Help-Q&A
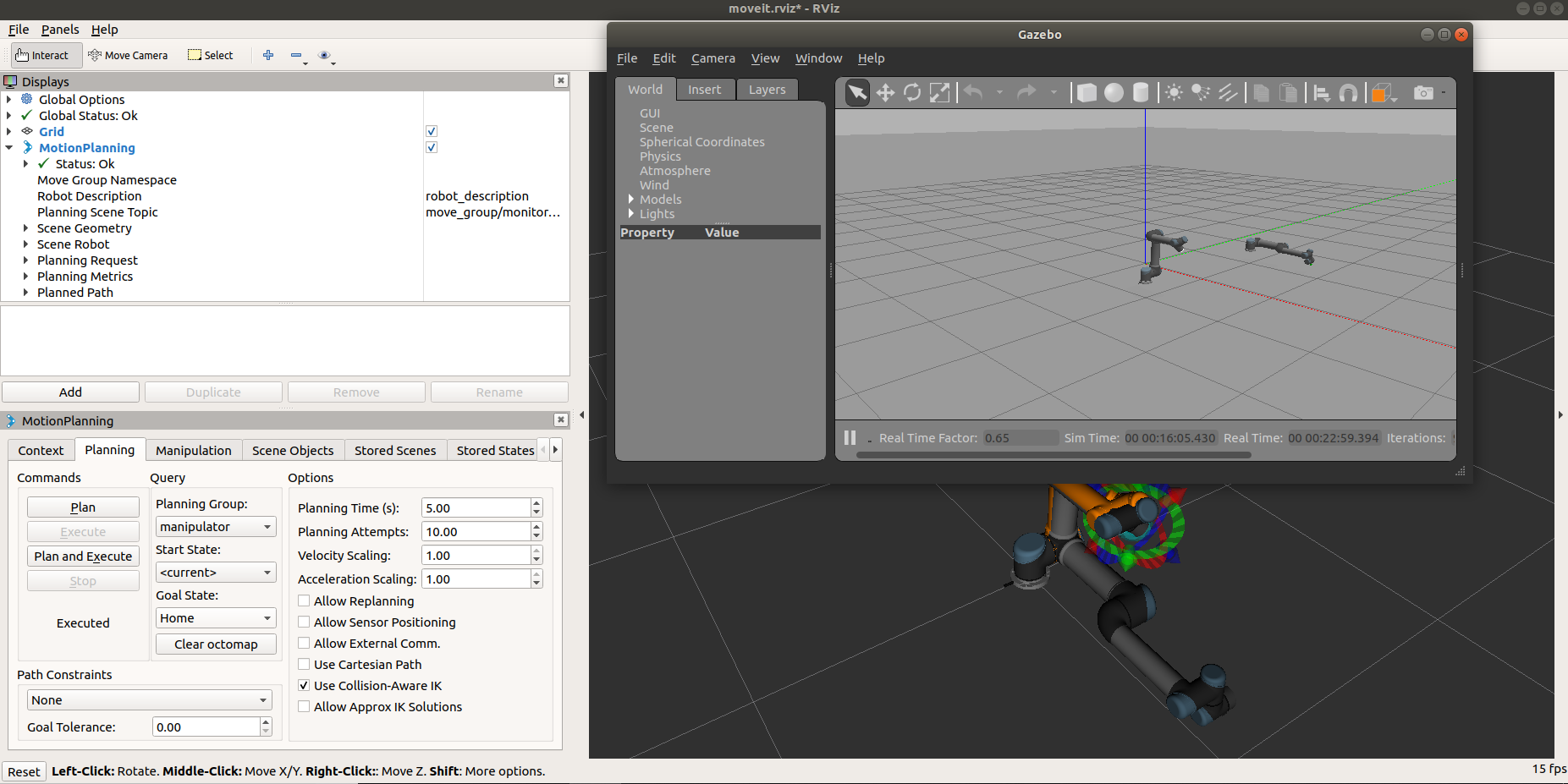
How to Control Two Universal Robots (UR-5) in the same Simulation Window - ROS for Industrial Robots 101 - The Construct ROS Community

Universal Robots - Shop Products

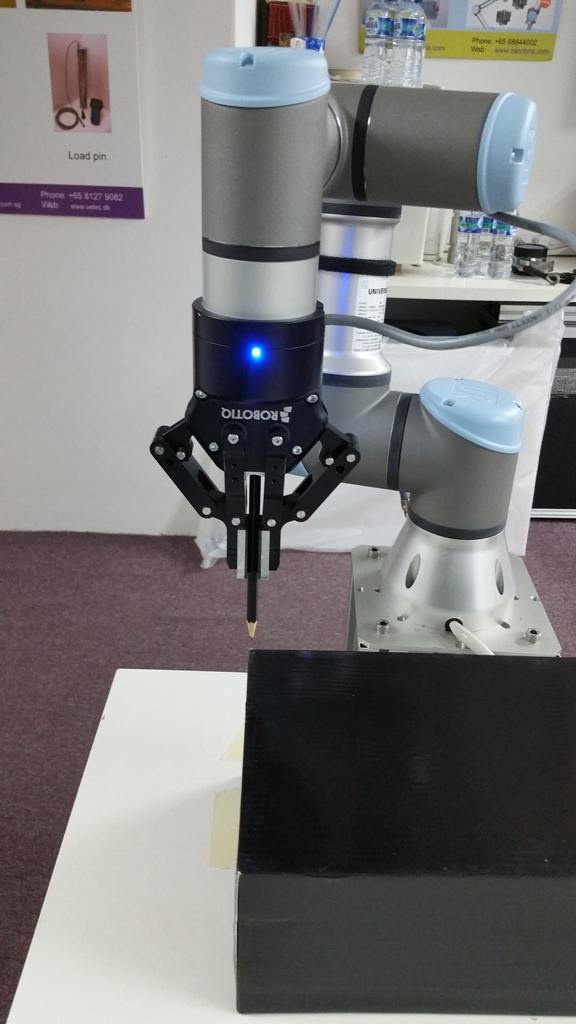
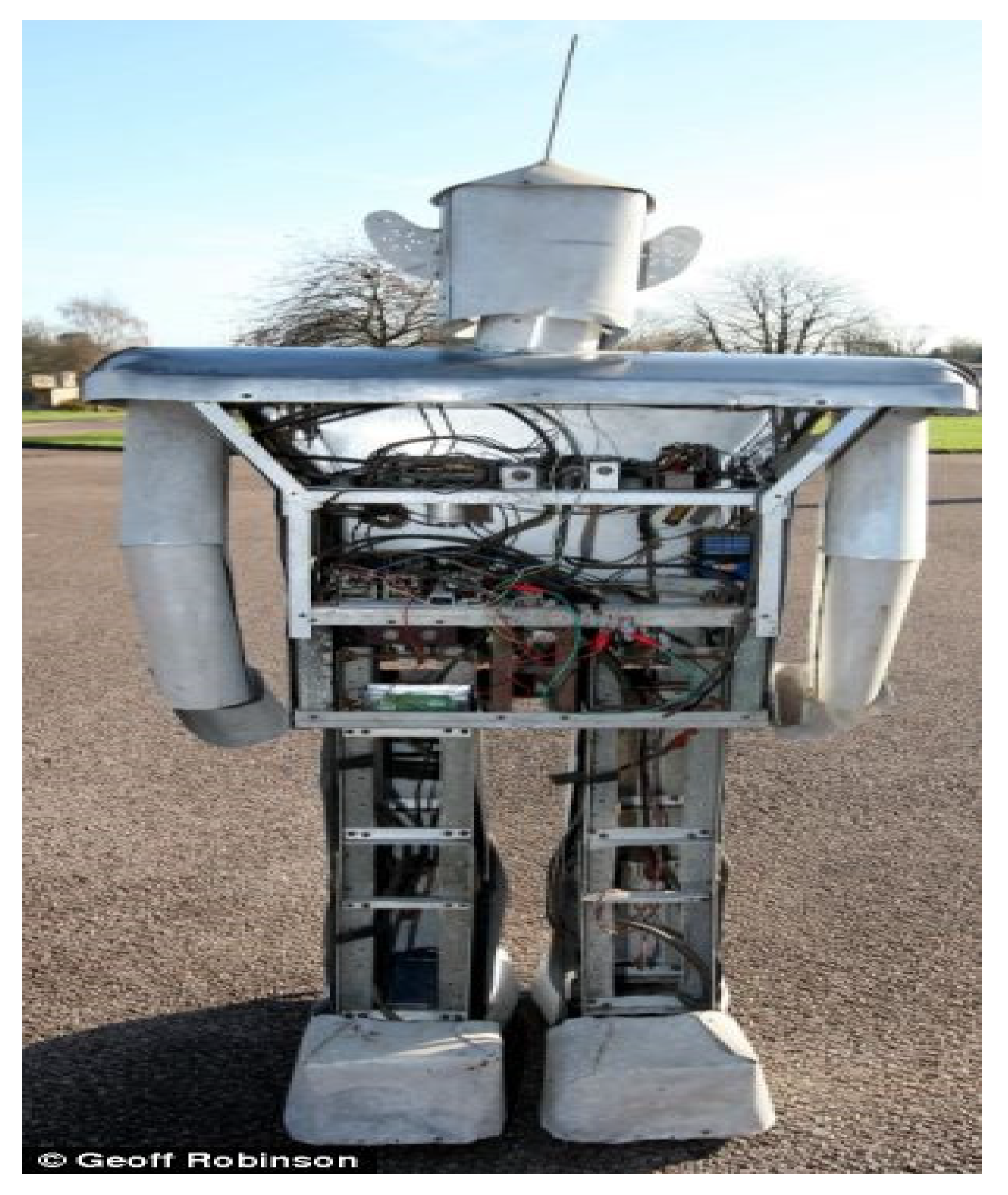
The Universal Robots arm, which can be manually moved to teach-in
/machines/machines-10-00913/article_de

UR Programming Functions: – UR Forum-Help-Q&A
Animation Magazine Sep/Oct Cartoon Forum Issue by Animation Magazine, Inc. - Issuu
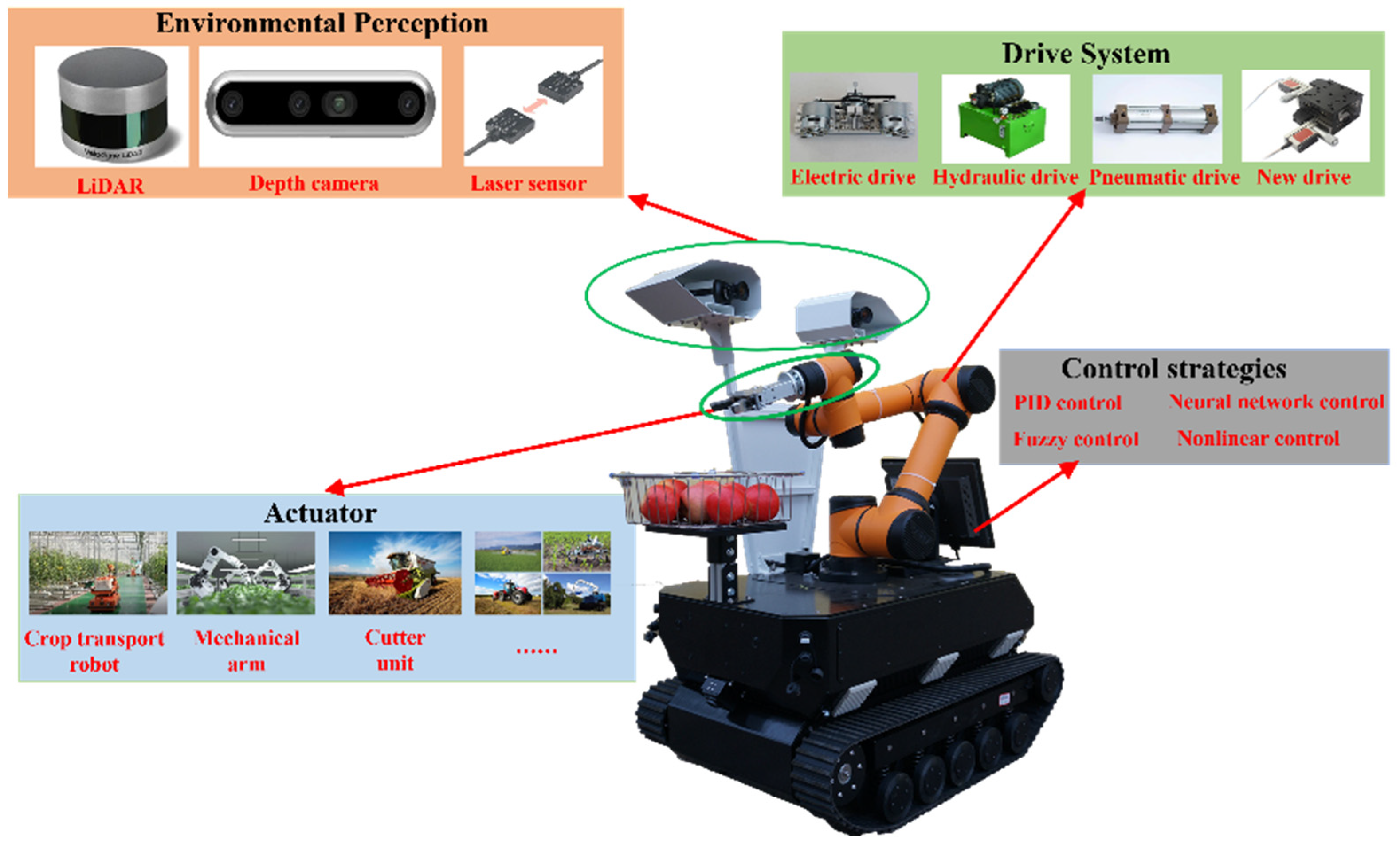
Applied Sciences, Free Full-Text
Planes and position variables 2 – UR Forum-Help-Q&A